Work
Things I've designed and built.
A collection of products, interfaces, and experiments. Each card loops a short demo — hover to explore, or open a case study for the full story.

Bengaluru Vega
Predicting multi-modal ETAs.
A machine learning system that predicts accurate arrival times across buses, metro, and road travel for Bengaluru's transit network — fusing multiple data sources into one reliable estimate.
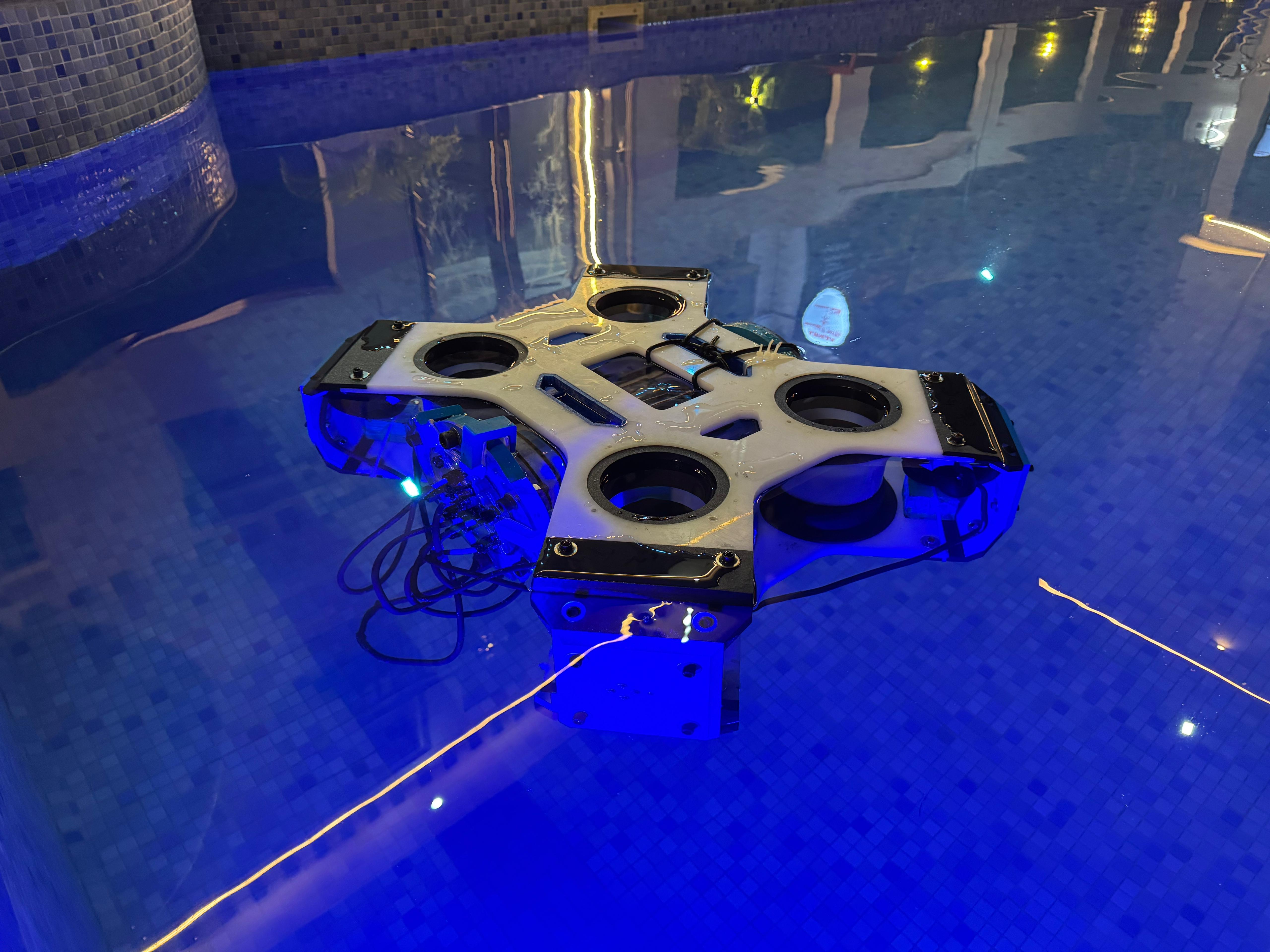
PySub
Control for a 6-DoF ROV.
A Python control stack for an 8-thruster V-config underwater ROV, implementing PID-based stability, thrust allocation, and live telemetry for precise 6 degrees-of-freedom maneuvering.
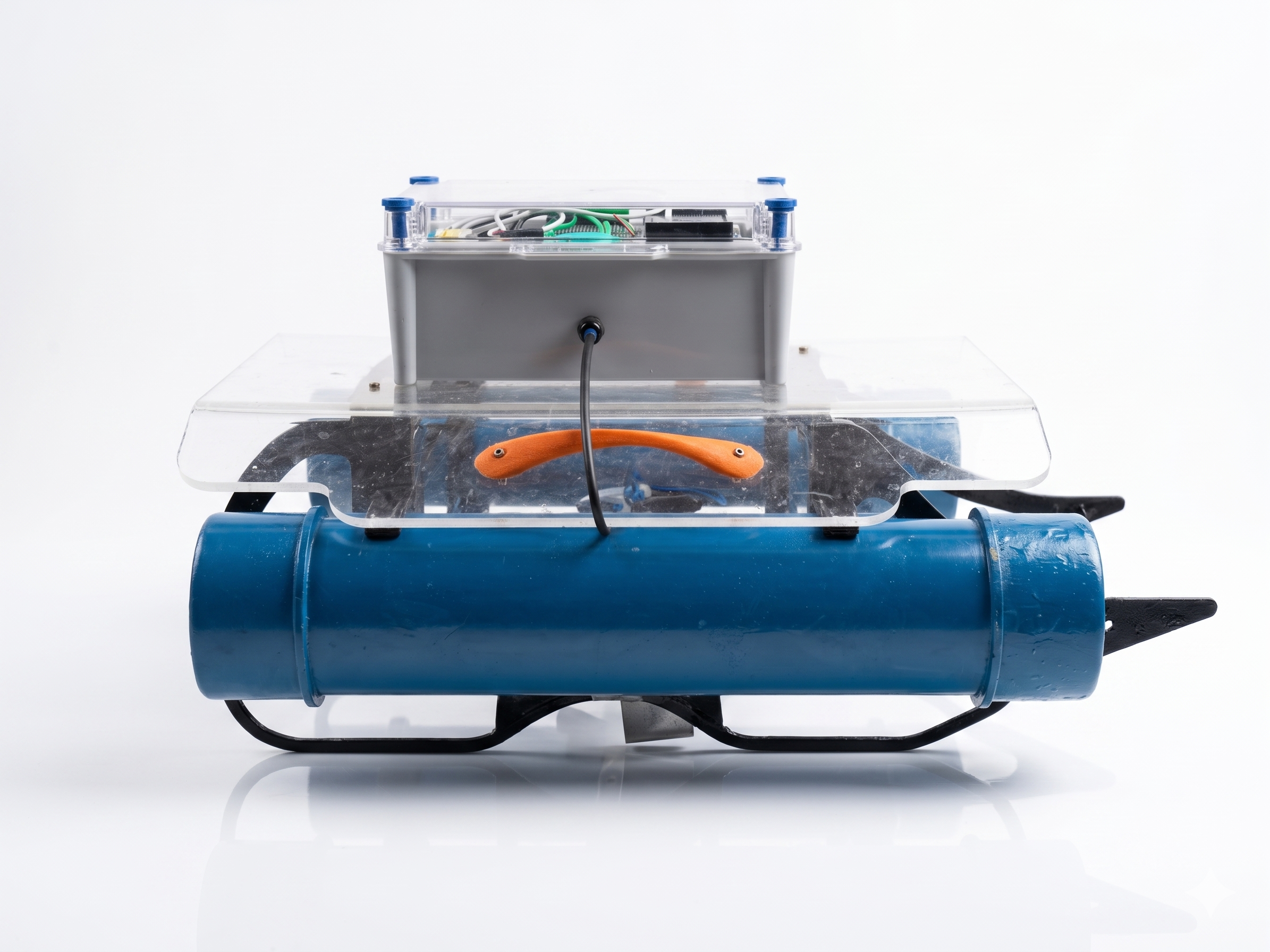
Autonomous Surface Vehicle
Self-navigating on water.
End-to-end control software for an autonomous surface vehicle — covering networking, control loops, and carrot-chasing path-following algorithms for reliable autonomous navigation.
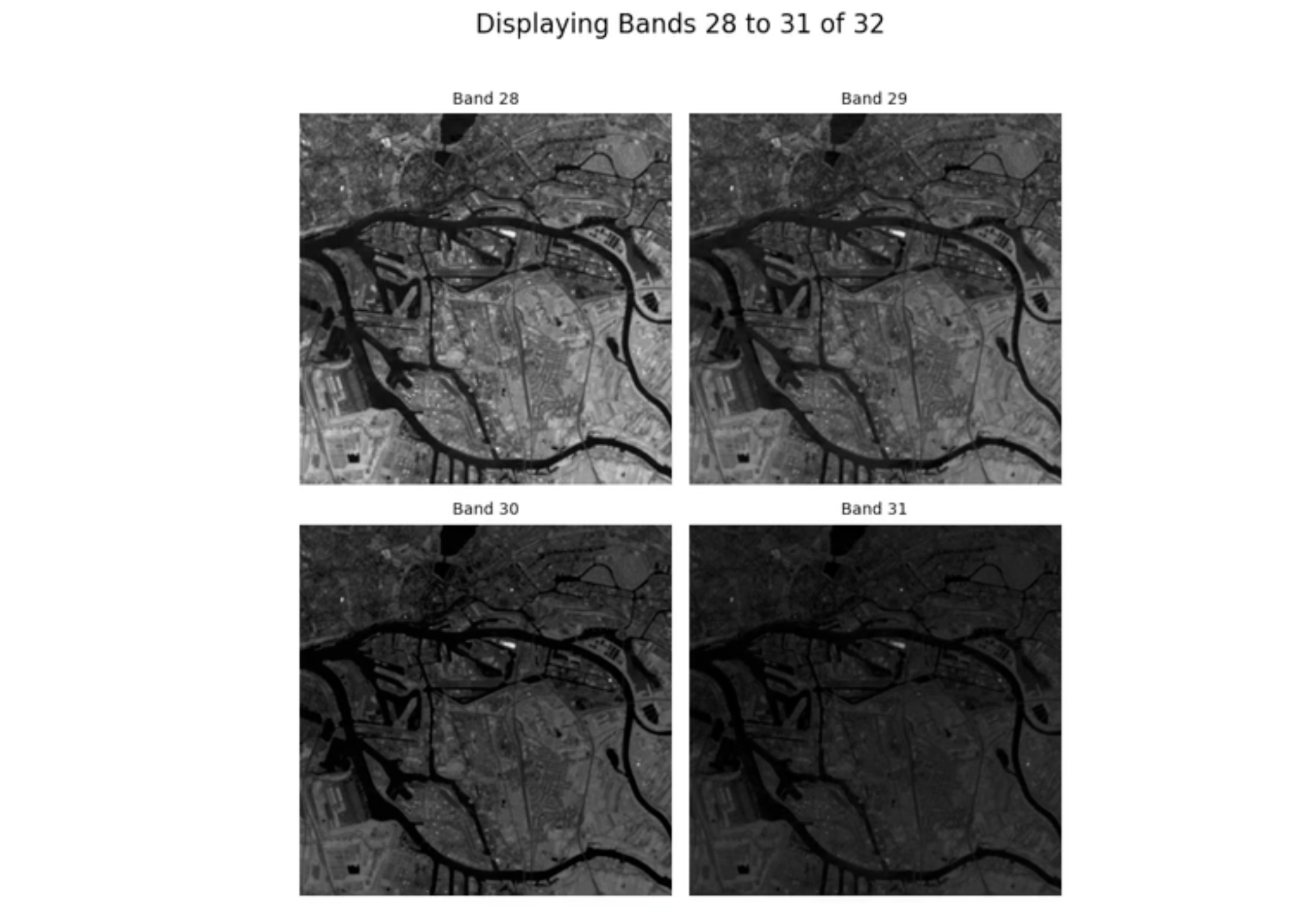
Hyperspectral Pipeline
Compression for satellite payloads.
A lightweight, memory-efficient pipeline for compressing, encoding, and reconstructing hyperspectral image (HSI) data for satellite payloads, with automated batch processing to accelerate research workflows.
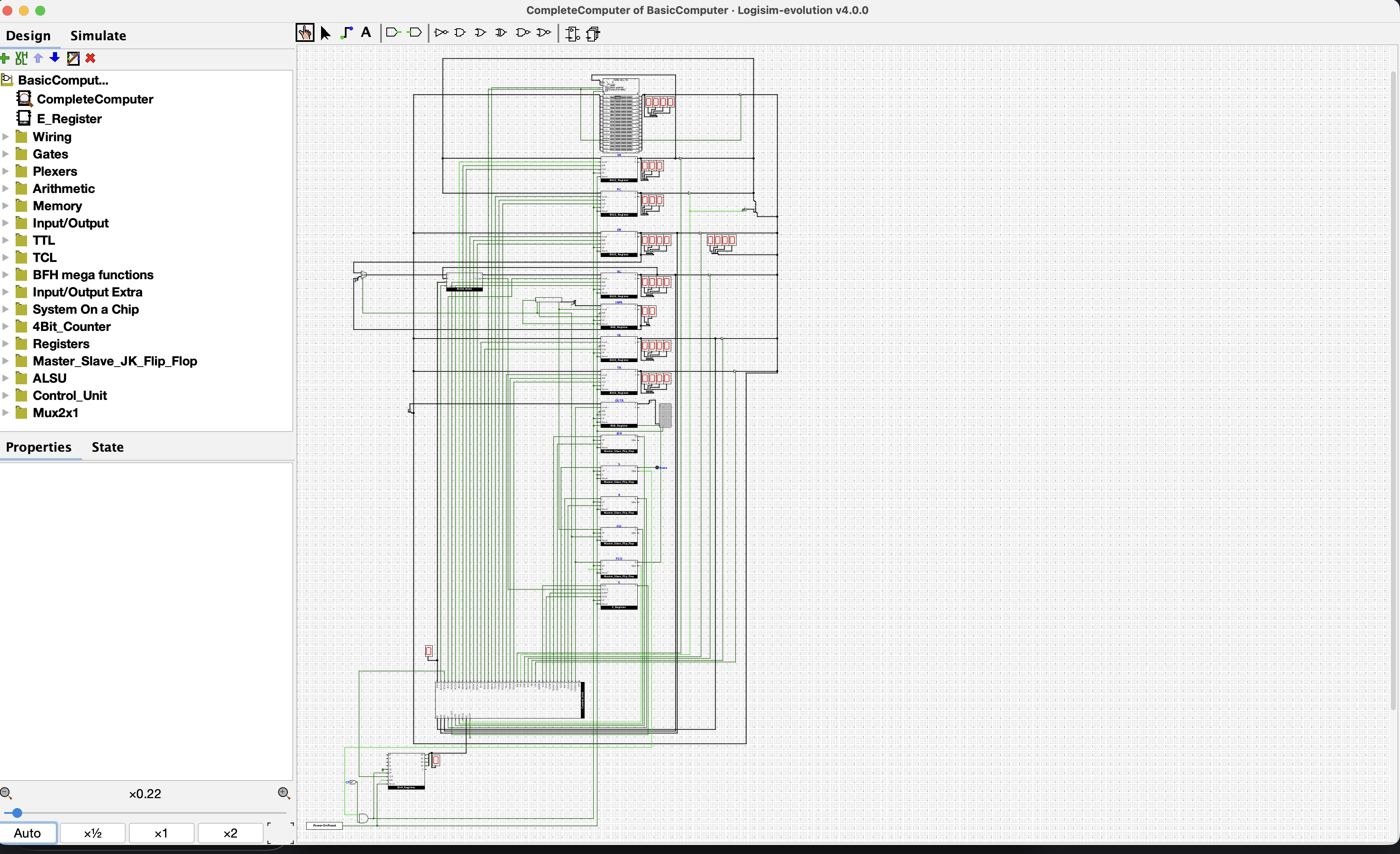
16-Bit Basic Computer
A CPU, from logic up.
A 16-bit basic computer (Mano Machine) built from digital logic — registers, buses, and a control unit — to explore computer architecture from first principles.
Visual Odometry Pipeline
Real-time trajectory tracking.
Developed a robust visual odometry system for autonomous navigation using stereo camera setups. The pipeline includes feature extraction, matching, outlier rejection, and camera pose estimation in GPS-denied environments.