Self-navigating on water.
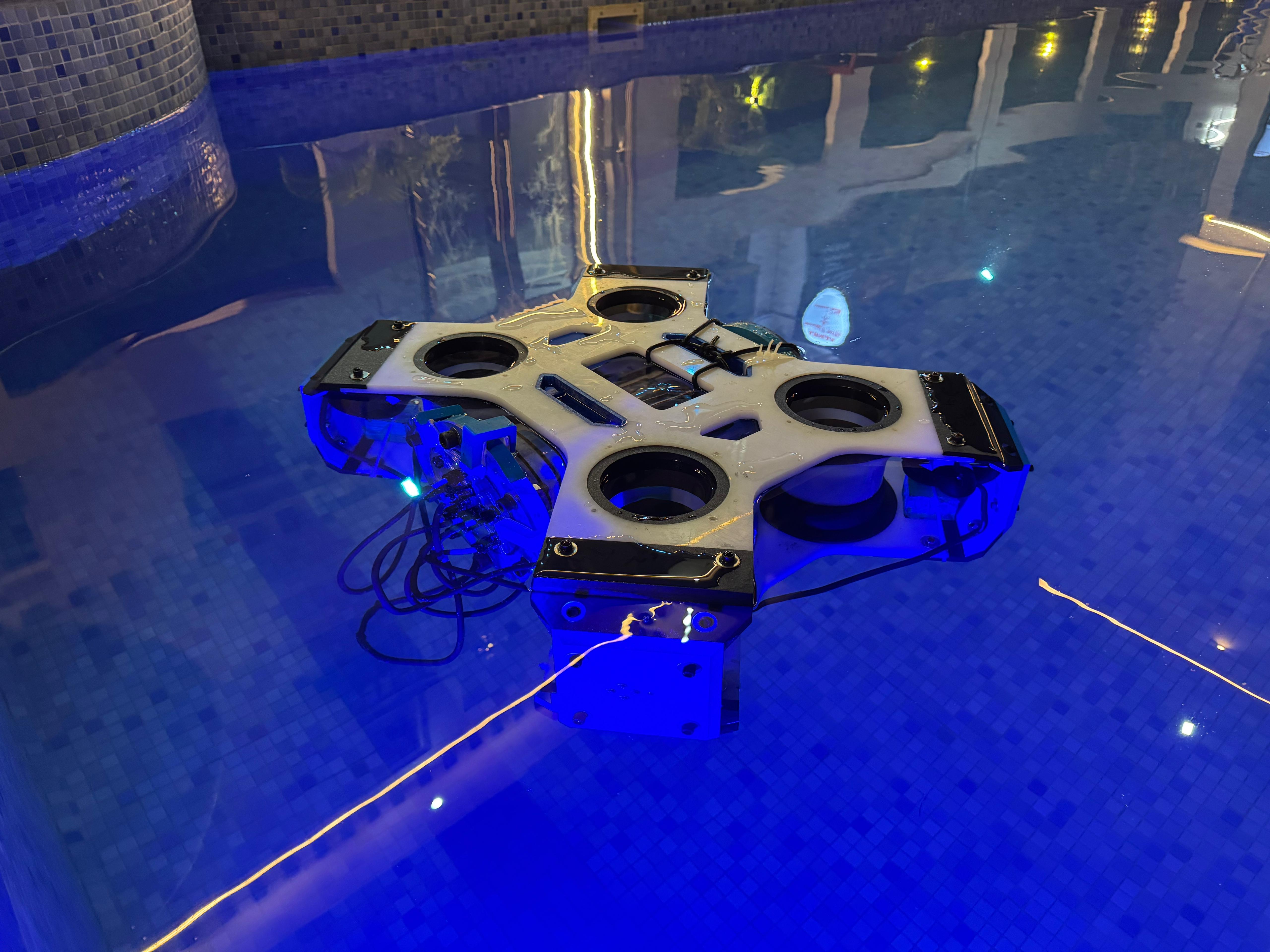
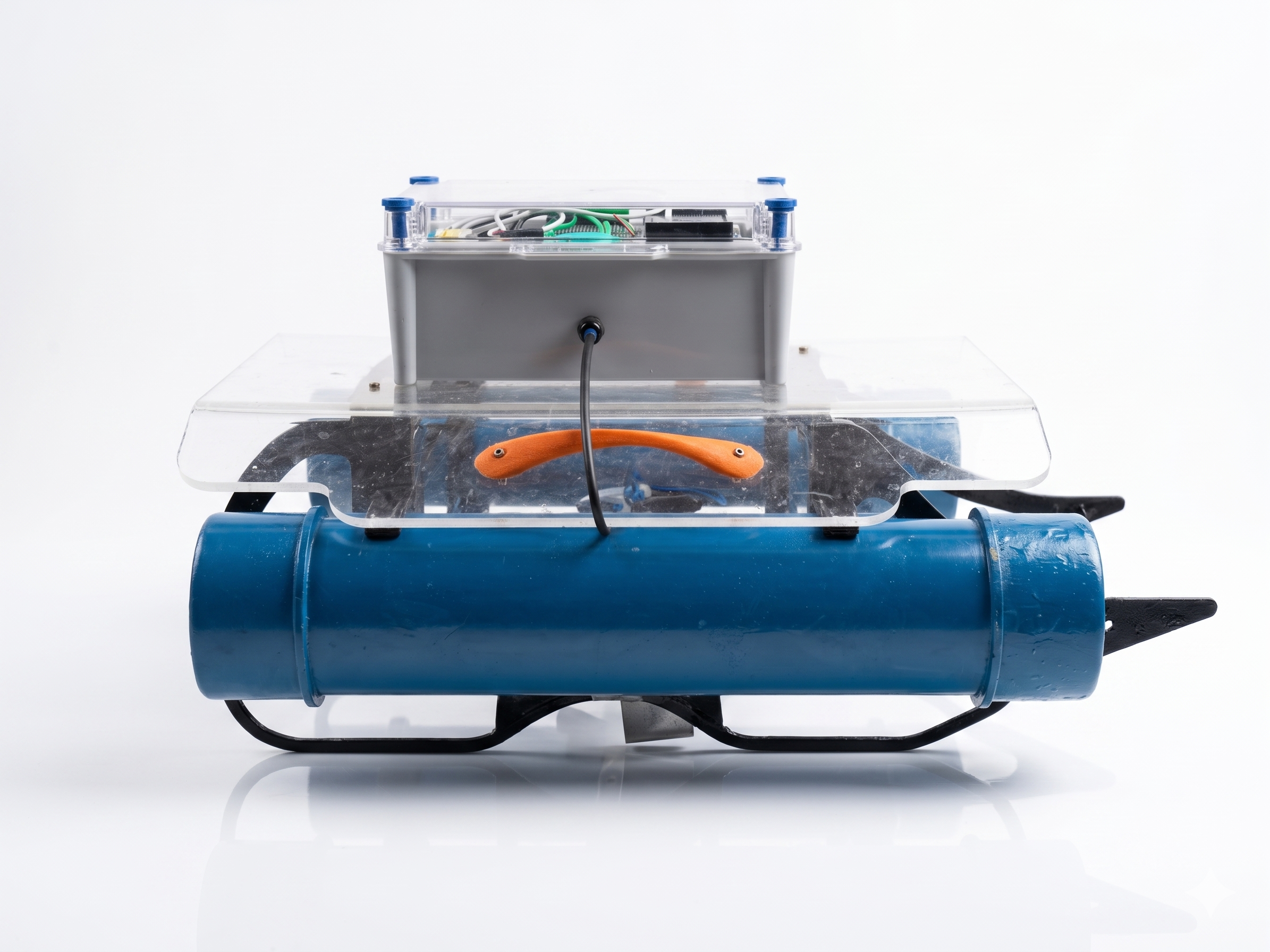
Autonomous Surface Vehicle
Year
2026
Role
Controls · Networking
Overview
End-to-end control software for an autonomous surface vehicle — covering networking, control loops, and carrot-chasing path-following algorithms for reliable autonomous navigation.
Every screen was refined until it disappeared — letting the content and the work speak for itself. The result is a calm, confident product that respects the people who use it.
The challenge
Distill a complex problem space into an interface that feels obvious — where the right action is always the easiest one.
The approach
Start with motion and hierarchy. Prototype early, test often, and let the smallest details carry the experience.
The outcome
A product that people genuinely enjoy using, with measurable gains in engagement, retention, and team velocity.