Real-time trajectory tracking.
Visual Odometry Pipeline
Year
2024
Role
Computer Vision
Overview
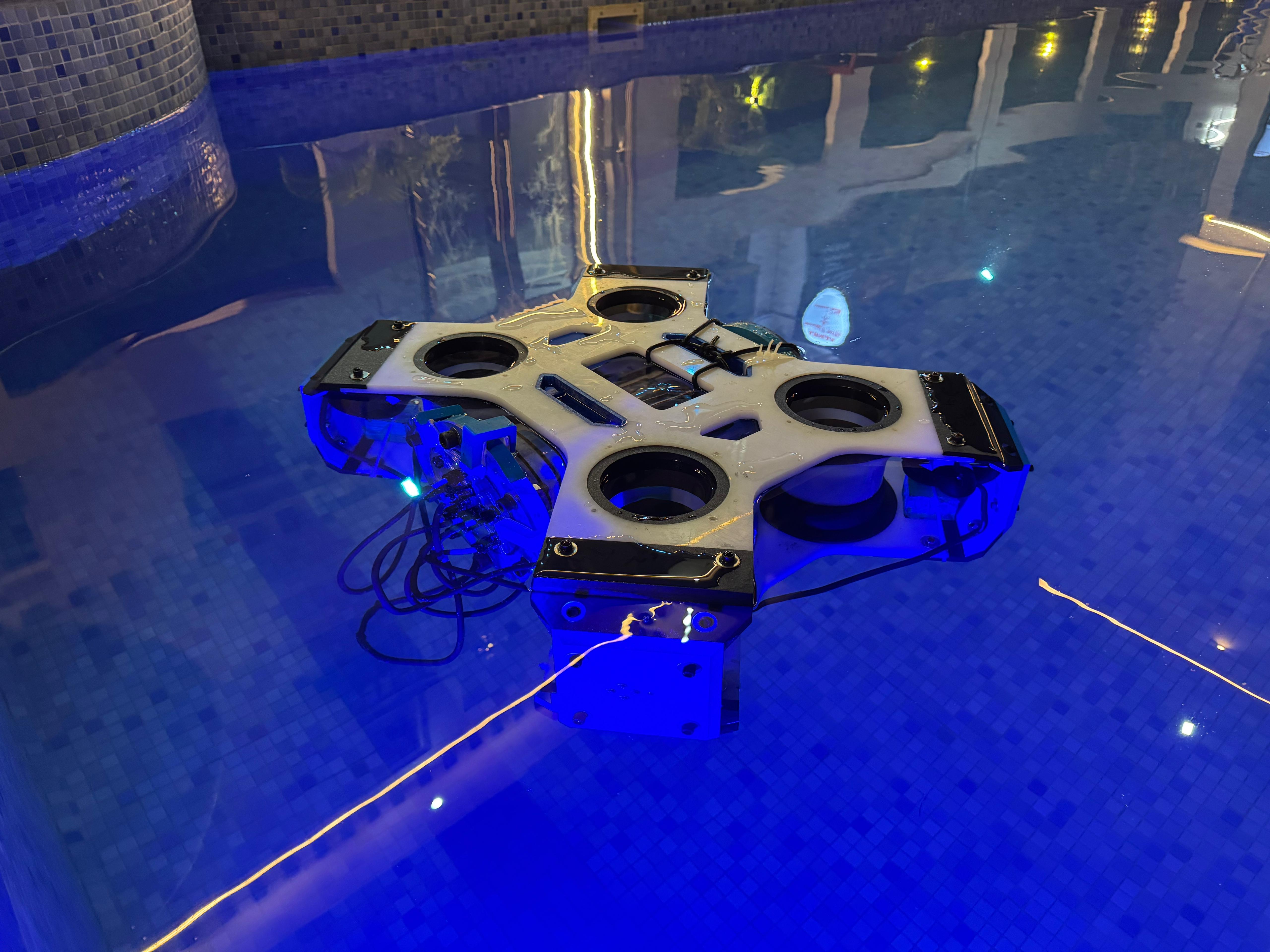
Developed a robust visual odometry system for autonomous navigation using stereo camera setups. The pipeline includes feature extraction, matching, outlier rejection, and camera pose estimation in GPS-denied environments.
Every screen was refined until it disappeared — letting the content and the work speak for itself. The result is a calm, confident product that respects the people who use it.
The challenge
Distill a complex problem space into an interface that feels obvious — where the right action is always the easiest one.
The approach
Start with motion and hierarchy. Prototype early, test often, and let the smallest details carry the experience.
The outcome
A product that people genuinely enjoy using, with measurable gains in engagement, retention, and team velocity.